
注:本文首发于笔者的个人微信公众号”iamtonybai”,是公号付费文章(价格1元)。首发于2020.10.9日,经过一个月收费期,我觉得将其免费分享出来。如果你觉得文章质量不错,欢迎到首发地址付费支持:https://mp.weixin.qq.com/s/rsDC-6paC5zN4sepWd5LqQ
近期在项目考虑在内存中保存从数据库加载的配置数据的方案,初步考虑采用map来保存。Go语言中有两个map,一个是Go语言原生的**map类型,而另外一种则是在Go 1.9版本新增到标准库中的sync.Map**。
一. 原生map的“先天不足”
对于已经初始化了的原生**map**,我们可以尽情地对其进行并发读:
// github.com/bigwhite/experiments/inside-syncmap/concurrent_builtin_map_read.go
package main
import (
"fmt"
"math/rand"
"sync"
)
func main() {
var wg sync.WaitGroup
var m = make(map[int]int, 100)
for i := 0; i < 100; i++ {
m[i] = i
}
wg.Add(10)
for i := 0; i < 10; i++ {
// 并发读
go func(i int) {
for j := 0; j < 100; j++ {
n := rand.Intn(100)
fmt.Printf("goroutine[%d] read m[%d]: %d\n", i, n, m[n])
}
wg.Done()
}(i)
}
wg.Wait()
}
但原生**map**一个最大的问题就是不支持多goroutine并发写。Go runtime内置对原生map并发写的检测,一旦检测到就会以panic的形式阻止程序继续运行,比如下面这个例子:
// github.com/bigwhite/experiments/inside-syncmap/concurrent_builtin_map_write.go
package main
import (
"math/rand"
"sync"
)
func main() {
var wg sync.WaitGroup
var m = make(map[int]int, 100)
for i := 0; i < 100; i++ {
m[i] = i
}
wg.Add(10)
for i := 0; i < 10; i++ {
// 并发写
go func(i int) {
for n := 0; n < 100; n++ {
n := rand.Intn(100)
m[n] = n
}
wg.Done()
}(i)
}
wg.Wait()
}
运行上面这个并发写的例子,我们很大可能会得到下面panic:
$go run concurrent_builtin_map_write.go
fatal error: concurrent map writes
... ...
原生map的“先天不足”让其无法直接胜任某些场合的要求,于是gopher们便寻求其他路径。一种路径无非是基于原生map包装出一个支持并发读写的自定义map类型,比如,最简单的方式就是用一把**互斥锁(sync.Mutex)同步各个goroutine对map内数据的访问;如果读多写少,还可以利用读写锁(sync.RWMutex)**来保护map内数据,减少锁竞争,提高并发读的性能。很多第三方map的实现原理也大体如此。
另外一种路径就是使用sync.Map。
二. sync.Map的原理简述
按照官方文档,sync.Map是goroutine-safe的,即多个goroutine同时对其读写都是ok的。和第一种路径的最大区别在于,sync.Map对特定场景做了性能优化,一种是读多写少的场景,另外一种多个goroutine读/写/修改的key集合没有交集。
下面是两种技术路径的性能基准测试结果对比(macOS(4核8线程) go 1.14):
// 对应的源码在https://github.com/bigwhite/experiments/tree/master/go19-examples/benchmark-for-map下面
$go test -bench .
goos: darwin
goarch: amd64
pkg: github.com/bigwhite/experiments/go19-examples/benchmark-for-map
BenchmarkBuiltinMapStoreParalell-8 7945152 179 ns/op
BenchmarkSyncMapStoreParalell-8 3523468 387 ns/op
BenchmarkBuiltinRwMapStoreParalell-8 7622342 190 ns/op
BenchmarkBuiltinMapLookupParalell-8 7319148 163 ns/op
BenchmarkBuiltinRwMapLookupParalell-8 21800383 55.2 ns/op
BenchmarkSyncMapLookupParalell-8 70512406 18.5 ns/op
BenchmarkBuiltinMapDeleteParalell-8 8773206 174 ns/op
BenchmarkBuiltinRwMapDeleteParalell-8 5424912 214 ns/op
BenchmarkSyncMapDeleteParalell-8 49899008 23.7 ns/op
PASS
ok github.com/bigwhite/experiments/go19-examples/benchmark-for-map 15.727s
我们看到:sync.Map在读和删除两项性能基准测试上的数据都大幅领先使用sync.Mutex或RWMutex包装的原生map,仅在写入一项上存在一倍的差距。sync.Map是如何实现如此高的读取性能的呢?简单说:空间换时间+读写分离+原子操作(快路径)。
sync.Map底层使用了两个原生map,一个叫read,仅用于读;一个叫dirty,用于在特定情况下存储最新写入的key-value数据:
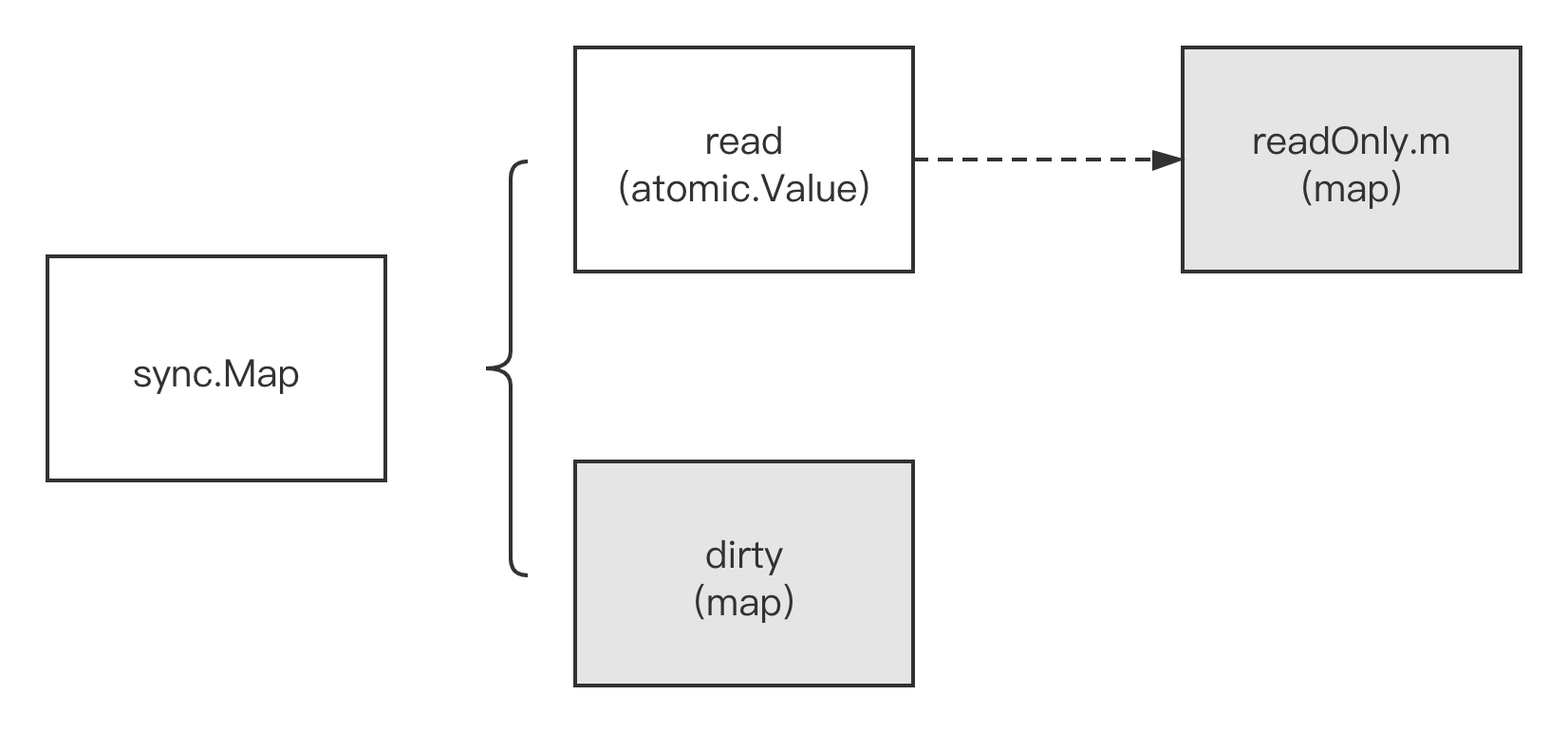
图:sync.Map内置两个原生map
read(这个map)好比整个sync.Map的一个**“高速缓存”,当goroutine从sync.Map中读取数据时,sync.Map会首先查看read这个缓存层是否有用户需要的数据(key是否命中),如果有(命中),则通过原子操作将数据读取并返回,这是sync.Map推荐的快路径(fast path),也是为何上面基准测试结果中读操作性能极高**的原因。
三. 通过实例深入理解sync.Map的原理
sync.Map源码(Go 1.14版本)不到400行,应该算是比较简单的了。但对于那些有着**“阅读源码恐惧症”**的gopher来说,我们可以通过另外一种研究方法:实例法,并结合些许源码来从“黑盒”角度理解sync.Map的工作原理。这种方法十分适合那些相对独立、可以从标准库中“单独”取出来的包,而sync.Map就是这样的包。
首先,我们将sync.Map从标准库源码目录中拷贝一份,放入本地**/go/src/github.com/bigwhite/experiments/inside-syncmap/syncmap/sync下面,得益于go module的引入,我们在/go/src/github.com/bigwhite/experiments/inside-syncmap/syncmap目录下面建立go.mod**文件:
module github.com/bigwhite/go
go 1.14
这样我们就可以通过github.com/bigwhite/go/sync包路径导入module:github.com/bigwhite/go下面的sync包了。
接下来,我们给位于**~/go/src/github.com/bigwhite/experiments/inside-syncmap/syncmap/sync下面的map.go中(sync.Map包的副本)添加一个Map类型的新方法Dump**:
// github.com/bigwhite/experiments/tree/master/inside-syncmap/syncmap/sync/map.go
func (m *Map) Dump() {
fmt.Printf("=====> sync.Map:\n")
// dump read
read, ok := m.read.Load().(readOnly)
fmt.Printf("\t read(amended=%v):\n", read.amended)
if ok {
// dump readOnly's map
for k, v := range read.m {
fmt.Printf("\t\t %#v:%#v\n", k, v)
}
}
// dump dirty
fmt.Printf("\t dirty:\n")
for k, v := range m.dirty {
fmt.Printf("\t\t %#v:%#v\n", k, v)
}
// dump miss
fmt.Printf("\t misses:%d\n", m.misses)
// dump expunged
fmt.Printf("\t expunged:%#v\n", expunged)
fmt.Printf("<===== sync.Map\n")
}
这个方法将打印Map的内部状态以及read、dirty两个原生map中的所有key-value对,这样我们在初始状态、store key-value后、load key以及delete key后通过Dump方法输出sync.Map状态便可以看到不同操作后sync.Map内部的状态变化,从而间接了解sync.Map的工作原理。下面我们就分情况剖析sync.Map的行为特征。
1. 初始状态
sync.Map是零值可用的,我们可以像下面这样定义一个sync.Map类型变量,并无需做显式初始化(关于零值可用,在我的Go专栏《改善Go语言编程质量的50个有效实践》中有专门的一节详述,有兴趣的gopher可以订阅学习^_^)。
// github.com/bigwhite/experiments/tree/master/inside-syncmap/syncmap/main.go
var m sync.Map
我们通过Dump输出初始状态下的sync.Map的内部状态:
// github.com/bigwhite/experiments/tree/master/inside-syncmap/syncmap/main.go
func main() {
var m sync.Map
fmt.Println("sync.Map init status:")
m.Dump()
... ...
}
运行后,输出如下:
sync.Map init status:
=====> sync.Map:
read(amended=false):
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc0001101e0)
<===== sync.Map
在初始状态下,dirty和read两个内置map内都无数据。expunged是一个哨兵变量(也是一个包内的非导出变量),它在sync.Map包初始化时就有了一个固定的值。该变量在后续用于元素删除场景(删除的key并不立即从map中删除,而是将其value置为expunged)以及load场景。如果哪个key值对应的value值与explunged一致,说明该key已经被map删除了(即便该key所占用的内存资源尚未释放)。
// map.go
var expunged = unsafe.Pointer(new(interface{}))
2. 写入数据(store)
下面,我们向Map写入一条数据:
// github.com/bigwhite/experiments/tree/master/inside-syncmap/syncmap/main.go
type val struct {
s string
}
func main() {
... ...
val1 := &val{"val1"}
m.Store("key1", val1)
fmt.Println("\nafter store key1:")
m.Dump()
... ...
}
我们看一下存入新数据后,Map内部的状态:
after store key1:
=====> sync.Map:
read(amended=true):
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000108080)}
misses:0
expunged:(unsafe.Pointer)(0xc000108040)
<===== sync.Map
我们看到写入(key1,value1)后,Map中有两处变化,一处是dirty map,新写入的数据存储在dirty map中;第二处是read中的amended值由false变为了true,表示dirty map中存在某些read map还没有的key。
3. dirty提升(promoted)为read
此时,如果我们调用一次sync.Map的Load方法,无论传给Load的key值是否为”key1″还是其他,sync.Map内部都会发生较大变化,我们来看一下:
// github.com/bigwhite/experiments/tree/master/inside-syncmap/syncmap/main.go
m.Load("key2") //这里我们尝试load key="key2"
fmt.Println("\nafter load key2:")
m.Dump()
下面是Load方法调用后Dump方法输出的内容:
after load key2:
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
我们看到:原dirty map中的数据被提升(promoted)到read map中了,提升后amended值重新变回false。
结合sync.Map中Load方法的源码,我们得出如下sync.Map的工作原理:当Load方法在read map中没有命中(miss)传入的key时,该方法会再次尝试在dirty中继续匹配key;无论是否匹配到,Load方法都会在锁保护下调用missLocked方法增加misses的计数(+1);如果增加完计数的misses值大于等于dirty map中的元素个数,则会将dirty中的元素整体提升到read:
// $GOROOT/src/sync/map.go
func (m *Map) missLocked() {
m.misses++ //计数+1
if m.misses < len(m.dirty) {
return
}
m.read.Store(readOnly{m: m.dirty}) // dirty提升到read
m.dirty = nil // dirty置为nil
m.misses = 0 // misses计数器清零
}
为了验证上述promoted的条件,我们再来做一组实验:
val2 := &val{"val2"}
m.Store("key2", val2)
fmt.Println("\nafter store key2:")
m.Dump()
val3 := &val{"val3"}
m.Store("key3", val3)
fmt.Println("\nafter store key3:")
m.Dump()
m.Load("key1")
fmt.Println("\nafter load key1:")
m.Dump()
m.Load("key2")
fmt.Println("\nafter load key2:")
m.Dump()
m.Load("key2")
fmt.Println("\nafter load key2 2nd:")
m.Dump()
m.Load("key2")
fmt.Println("\nafter load key2 3rd:")
m.Dump()
在完成一次promoted动作之后,我们又向sync.Map中写入两个key:key2和key3,并在后续Load一次key1并连续三次Load key2,下面是Dump方法的输出结果:
after store key2:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after store key3:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after load key1:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after load key2:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
misses:1
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after load key2 2nd:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
misses:2
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after load key2 3rd:
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010290)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
我们看到在写入key2这条数据后,dirty中不仅存储了key2这条数据,原read中的key1数据也被复制了一份存入到dirty中。这个操作是由sync.Map的dirtyLocked方法完成的:
// $GOROOT/src/sync/map.go
func (m *Map) dirtyLocked() {
if m.dirty != nil {
return
}
read, _ := m.read.Load().(readOnly)
m.dirty = make(map[interface{}]*entry, len(read.m))
for k, e := range read.m {
if !e.tryExpungeLocked() {
m.dirty[k] = e
}
}
}
前面我们提到过,promoted(dirty -> read)是一个整体的指针交换操作,promoted时,sync.Map直接将原dirty指针store给read并将自身置为nil,因此sync.Map要保证amended=true时,dirty中拥有整个Map的全量数据,这样在下一次promoted(dirty -> read)时才不会丢失数据。不过dirtyLocked是通过一个迭代实现的元素从read到dirty的复制,如果Map中元素规模很大,这个过程付出的损耗将很大,并且这个过程是在锁保护下的。
在存入key3后,我们调用Load方法先load了key1,由于key1在read中有记录,因此此次load命中了,走的是快路径,对Map状态没有任何影响。
之后,我们又Load了key2,key2不在read中,因此产生了一次miss。misses增加计数后的值为1,而此时dirty中的元素数量为3,不满足promote的条件,于是没有执行promote操作。后续我们又连续进行了两次key2的Load操作,产生了两次miss事件后,misses的计数值等于了dirty中的元素数量,于是promote操作被执行,dirty map整体被置换给read,自己则变成了nil。
4. 更新已存在的key
我们再来看一下更新已存在的key的值的情况。首先是该key仅存在于read中(刚刚promote完毕),而不在dirty中。我们更新这时仅在read中存在的key2的值:
val2_1 := &val{"val2_1"}
m.Store("key2", val2_1)
fmt.Println("\nafter update key2(in read, not in dirty):")
m.Dump()
下面是Dump输出的结果:
after update key2(in read, not in dirty):
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e2d0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc00008e1e0)
<===== sync.Map
我们看到sync.Map直接更新了位于read中的key2的值(entry.storeLocked方法实现的),dirty和其他字段没有受到影响。
第二种情况是该key刚store到dirty中,尚未promote,不在read中。我们新增一个key4,并更新其值:
val4 := &val{"val4"}
m.Store("key4", val4)
fmt.Println("\nafter store key4:")
m.Dump()
val4_1 := &val{"val4_1"}
m.Store("key4", val4_1)
fmt.Println("\nafter update key4(not in read, in dirty):")
m.Dump()
dump方法的输出结果如下:
after store key4:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e2d0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e2d0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
"key4":&smap.entry{p:(unsafe.Pointer)(0xc00008e310)}
misses:0
expunged:(unsafe.Pointer)(0xc00008e1e0)
<===== sync.Map
after update key4(not in read, in dirty):
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e2d0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e2d0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
"key4":&smap.entry{p:(unsafe.Pointer)(0xc00008e330)}
misses:0
expunged:(unsafe.Pointer)(0xc00008e1e0)
<===== sync.Map
我们看到,sync.Map同样是直接将key4对应的value重新设置为新值(val4_1)。
5. 删除key
为了方便查看,我们将上述Map状态回滚到刚刚promote(dirty -> read)完的时刻,即:
after load key2 3rd:
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc00008e220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc00008e270)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc00008e2a0)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc00008e1e0)
<===== sync.Map
删除key也有几种情况,我们分别来看一下:
- 删除的key仅存在于read中
我们删除上面Map中仅存在于read中的key2:
m.Delete("key2")
fmt.Println("\nafter delete key2:")
m.Dump()
删除后的Dump结果如下:
after delete key2:
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000010240)}
"key2":&smap.entry{p:(unsafe.Pointer)(nil)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
我们看到sync.Map并没有删除key2,而是将其value置为nil。
- 删除的key仅存在于dirty中
为了构造初仅存在于dirty中的key,我们向sync.Map写入新数据key4,然后再立刻删除它
val4 := &val{"val4"}
m.Store("key4", val4)
fmt.Println("\nafter store key4:")
m.Dump()
m.Delete("key4")
fmt.Println("\nafter delete key4:")
m.Dump()
上述代码的Dump结果如下:
after store key4:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000104220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc0001041e0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
dirty:
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000104220)}
"key4":&smap.entry{p:(unsafe.Pointer)(0xc0001042f0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
misses:0
expunged:(unsafe.Pointer)(0xc0001041e0)
<===== sync.Map
after delete key4:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000104220)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc0001041e0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
dirty:
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
"key1":&smap.entry{p:(unsafe.Pointer)(0xc000104220)}
misses:0
expunged:(unsafe.Pointer)(0xc0001041e0)
<===== sync.Map
我们看到:和仅在read中的情况不同(仅将value设置为nil),仅存在于dirty中的key被删除后,该key就不再存在了。这里还有一点值得注意的是:当向dirty写入key4时,dirty会复制read中的未被删除的元素,由于key2已经被删除,因此顺带将read中的key2对应的value设置为哨兵(expunged),并且该key不会被加入到dirty中。直到下一次promote,该key才会被回收(因为read被交换指向新的dirty,原read指向的内存将被GC)。
- 删除的key既存在于read,也存在于dirty中
目前上述sync.Map实例中既存在于read,也存在于dirty中的key有key1和key3(key2已经被删除),我们这里以删除key1为例:
after delete key1:
=====> sync.Map:
read(amended=true):
"key2":&smap.entry{p:(unsafe.Pointer)(0xc0001041e0)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
"key1":&smap.entry{p:(unsafe.Pointer)(nil)}
dirty:
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0001042a0)}
"key1":&smap.entry{p:(unsafe.Pointer)(nil)}
misses:0
expunged:(unsafe.Pointer)(0xc0001041e0)
<===== sync.Map
我们看到删除key1后,read和dirty两个map中的key1均没有真正删除,而是将其value设置为nil。
我们再触发一次promote:连续调用两次导致read miss的LOAD:
m.Load("key5")
fmt.Println("\nafter load key5:")
m.Dump()
m.Load("key5")
fmt.Println("\nafter load key5 2nd:")
m.Dump()
调用后的Dump输出如下:
after load key5:
=====> sync.Map:
read(amended=true):
"key1":&smap.entry{p:(unsafe.Pointer)(nil)}
"key2":&smap.entry{p:(unsafe.Pointer)(0xc000010200)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
dirty:
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
"key1":&smap.entry{p:(unsafe.Pointer)(nil)}
misses:1
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
after load key5 2nd:
=====> sync.Map:
read(amended=false):
"key1":&smap.entry{p:(unsafe.Pointer)(nil)}
"key3":&smap.entry{p:(unsafe.Pointer)(0xc0000102c0)}
dirty:
misses:0
expunged:(unsafe.Pointer)(0xc000010200)
<===== sync.Map
我们看到虽然dirty中的key1已经处于被删除状态,但它仍算作dirty元素的个数,因此第二次miss才会触发promote。promote后,dirty被赋值给read,因此原dirty中的key1元素就顺带进入到read中,只能等下次写入一个不存在的新key时才能被置为哨兵值,并在下一次promote时才能被真正删除释放。
四. 小结
通过实例法,我们大致得到了sync.Map的工作原理和行为特征,从这些结果来看sync.Map并非是一个可应用于所有场合的goroutine-safe的map实现,但在读多写少的情况下,sync.Map才能发挥出最大的效能。
本文涉及代码可以在这里 https://github.com/bigwhite/experiments/tree/master/inside-syncmap 下载。
我的Go技术专栏:“改善Go语⾔编程质量的50个有效实践”上线了,欢迎大家订阅学习!
我的网课“Kubernetes实战:高可用集群搭建、配置、运维与应用”在慕课网上线了,感谢小伙伴们学习支持!
我爱发短信:企业级短信平台定制开发专家 https://tonybai.com/
smspush : 可部署在企业内部的定制化短信平台,三网覆盖,不惧大并发接入,可定制扩展; 短信内容你来定,不再受约束, 接口丰富,支持长短信,签名可选。
2020年4月8日,中国三大电信运营商联合发布《5G消息白皮书》,51短信平台也会全新升级到“51商用消息平台”,全面支持5G RCS消息。
著名云主机服务厂商DigitalOcean发布最新的主机计划,入门级Droplet配置升级为:1 core CPU、1G内存、25G高速SSD,价格5$/月。有使用DigitalOcean需求的朋友,可以打开这个链接地址:https://m.do.co/c/bff6eed92687 开启你的DO主机之路。
Gopher Daily(Gopher每日新闻)归档仓库 – https://github.com/bigwhite/gopherdaily
我的联系方式:
- 微博:https://weibo.com/bigwhite20xx
- 微信公众号:iamtonybai
- 博客:tonybai.com
- github: https://github.com/bigwhite
微信赞赏:
商务合作方式:撰稿、出书、培训、在线课程、合伙创业、咨询、广告合作。